Abstract
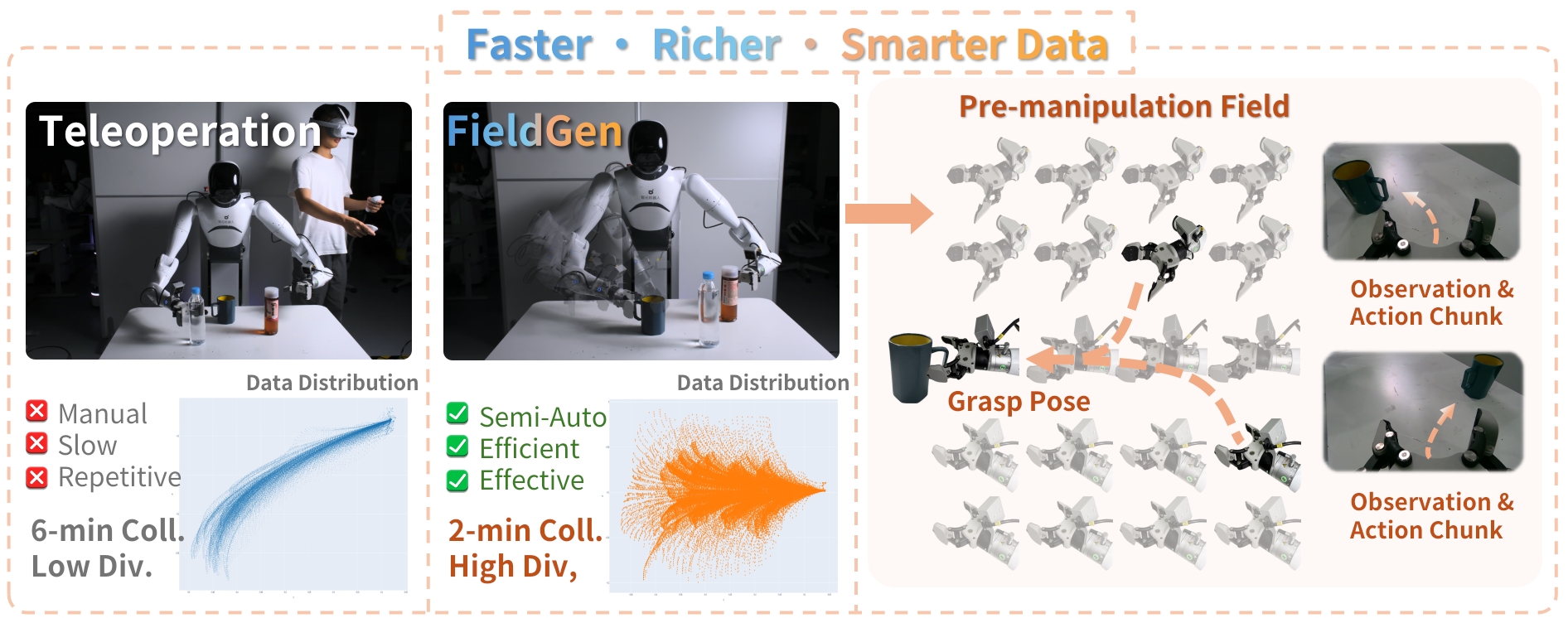
FieldGen is a semi-automatic data generation framework that enables scalable collection of diverse, high-quality real-world manipulation data with minimal human involvement.
Large-scale diverse data underpin robust manipulation, yet existing pipelines trade scale, diversity, and quality: simulation scales but leaves sim-to-real gaps; teleoperation is precise but costly and behaviorally narrow. We present FieldGen, a field-guided framework with a two-phase split: a pre-manipulation phase, where trajectory variation is acceptable, and a fine manipulation phase, which requires precise expert demonstration. This decoupling concentrates human effort on contact-critical states while scaling varied real-robot reach data. Policies trained on FieldGen data surpass teleoperation baselines in success, require markedly less human labor, and enable stable long-duration collection.
Method Overview
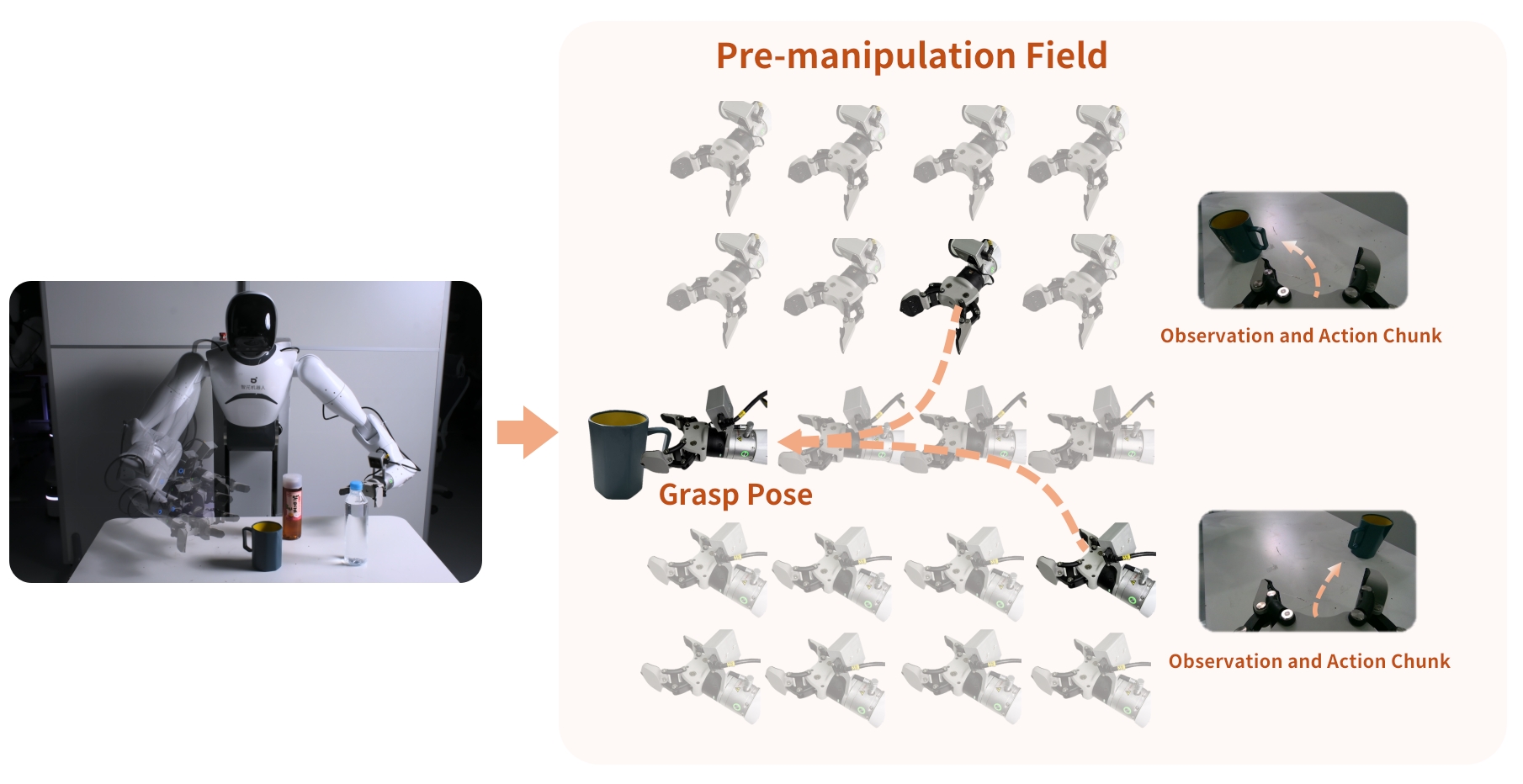
FieldGen Pipeline: Our framework splits manipulation into two phases. In the fine manipulation phase, human operators provide sparse teleoperated demonstrations focusing on contact-critical manipulation poses. These key poses are then used to construct the Pre-Manipulation Field (PMF), which consists of a cone field for positional guidance and a spherical field for orientation alignment. In the pre-manipulation phase, we automatically generate diverse reach trajectories by sampling random initial configurations and computing attraction-based actions toward the PMF, enabling scalable data collection with minimal human effort.
Pre-Manipulation Field Construction
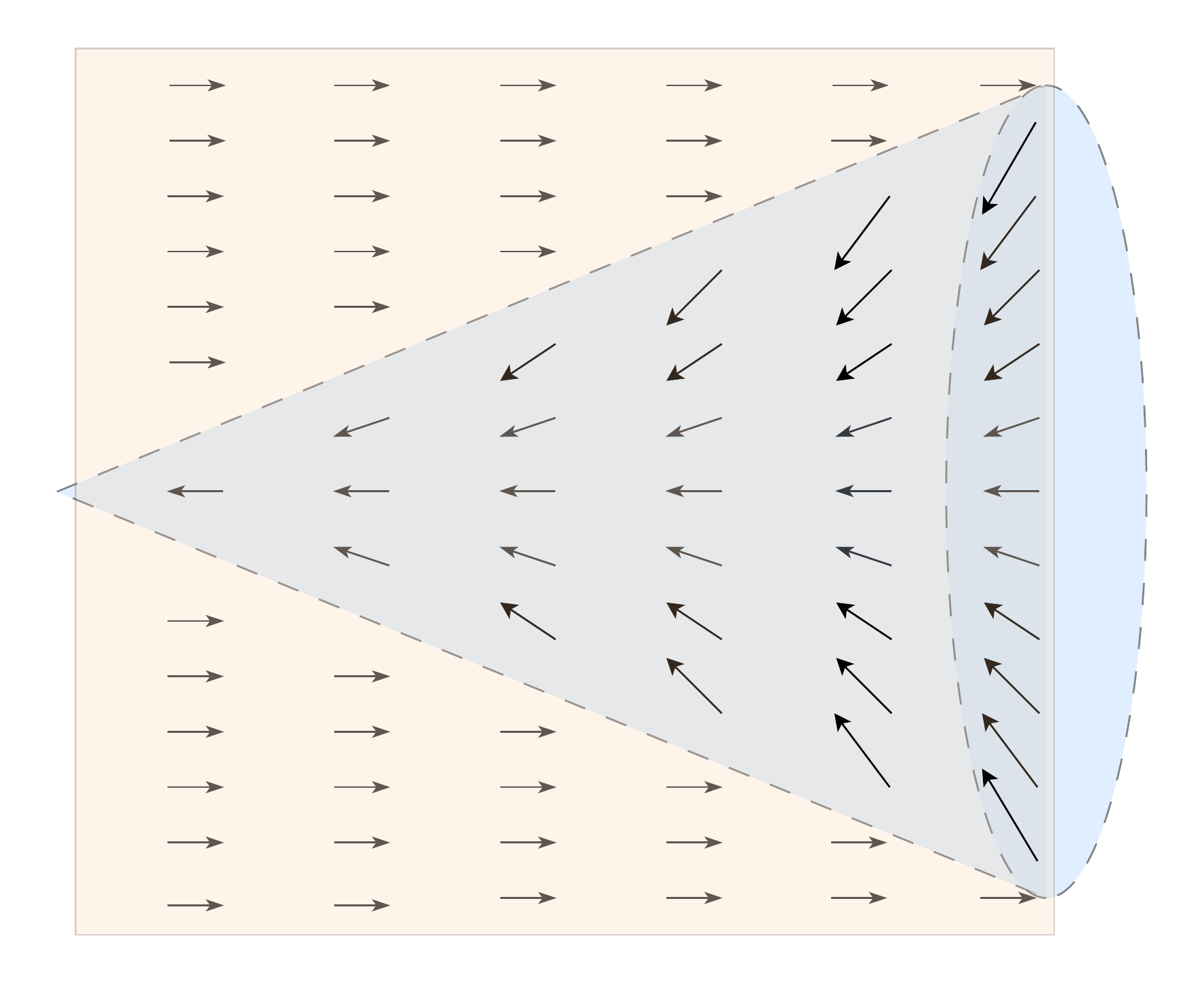
Cone Field for Position
The cone field guides the end-effector's positional approach toward the goal. Points inside the cone follow smooth half-cycloid trajectories, while points outside are first projected onto the cone surface.
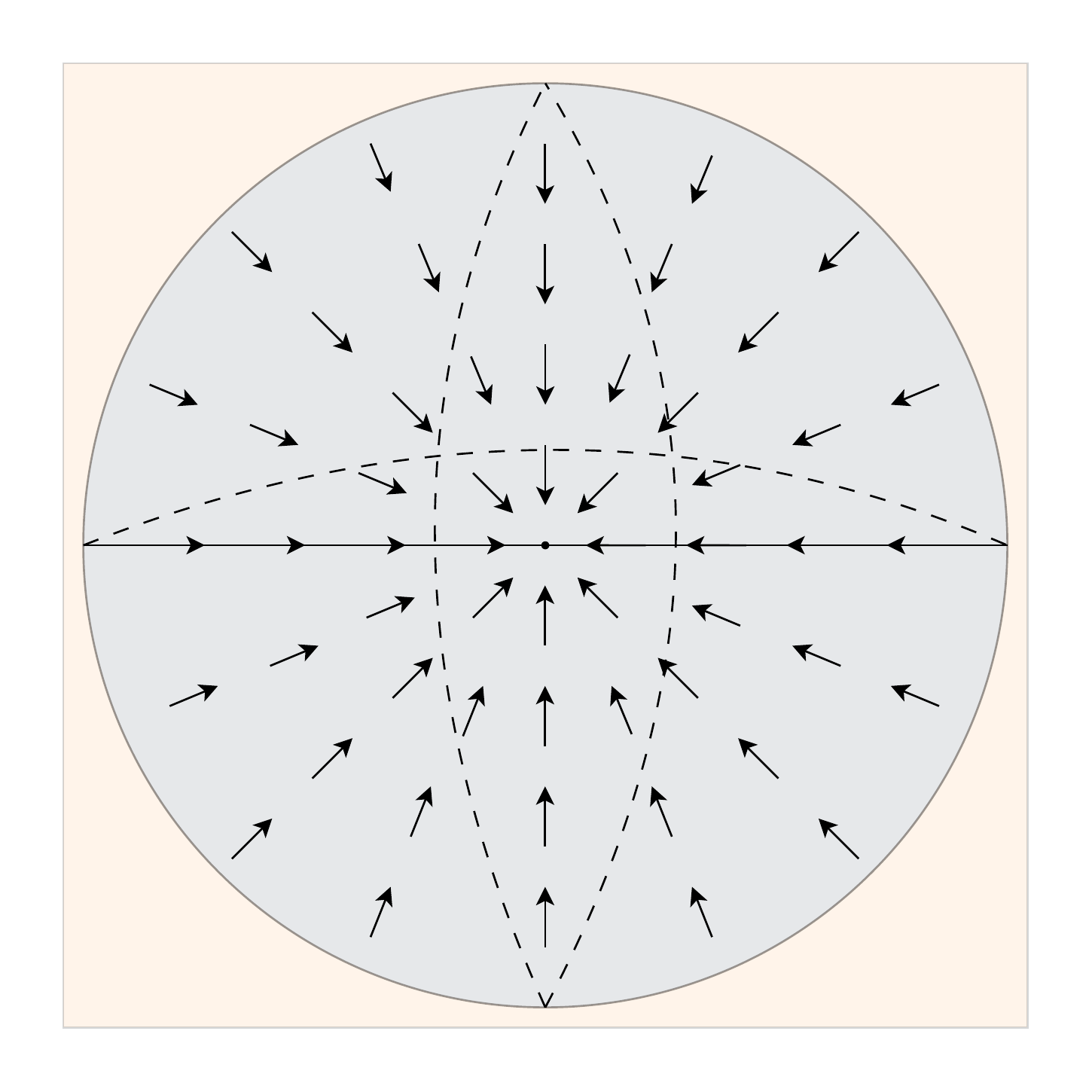
Spherical Field for Orientation
The spherical field aligns the gripper orientation during the approach phase using rotation matrices and logarithmic mapping in SO(3) for smooth corrective angular updates.
Equal-Time Data Effectiveness
We evaluate FieldGen on four diverse manipulation tasks under equal wall-clock collection time.

Pick
Basic grasping with position variation
Rotate Pick
Requires orientation change

Transparent Pick
Challenging transparent perception
Affordance Pick
Specific grasp region targeting
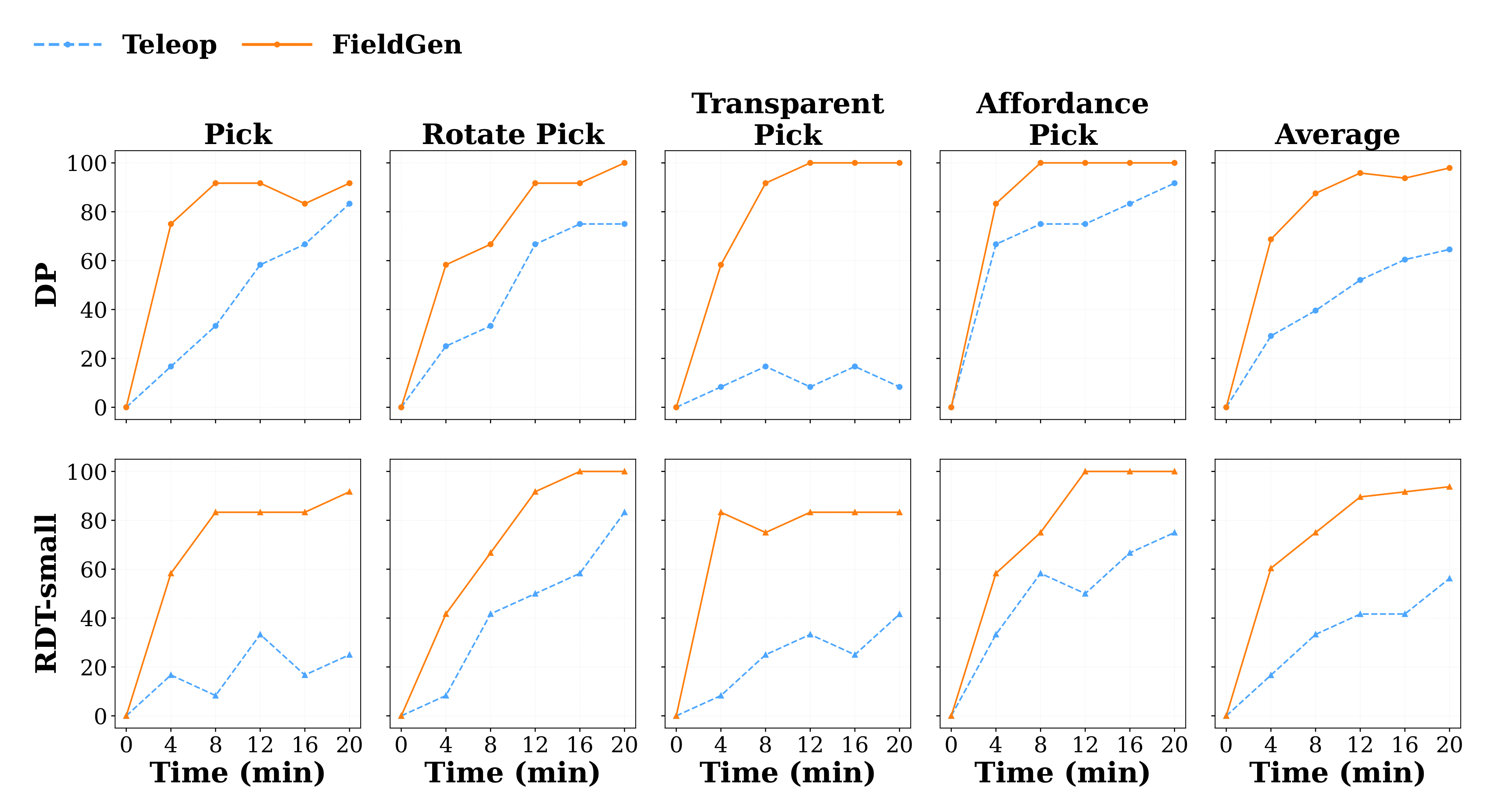
Key Findings: Across all 4–20 minute checkpoints, FieldGen's success rate exceeded teleoperation by an average of +41.9%. With just 20 minutes of collection time, FieldGen achieves over 90% success rate on average across all tasks, with DP reaching 100% on three tasks. This demonstrates FieldGen's superior time efficiency in data collection.
Generalization Performance
FieldGen demonstrates superior generalization across start poses, object positions, and object instances.

Generalization Test Setup
Three generalization regimes: varied initial poses, object positions, and unseen objects
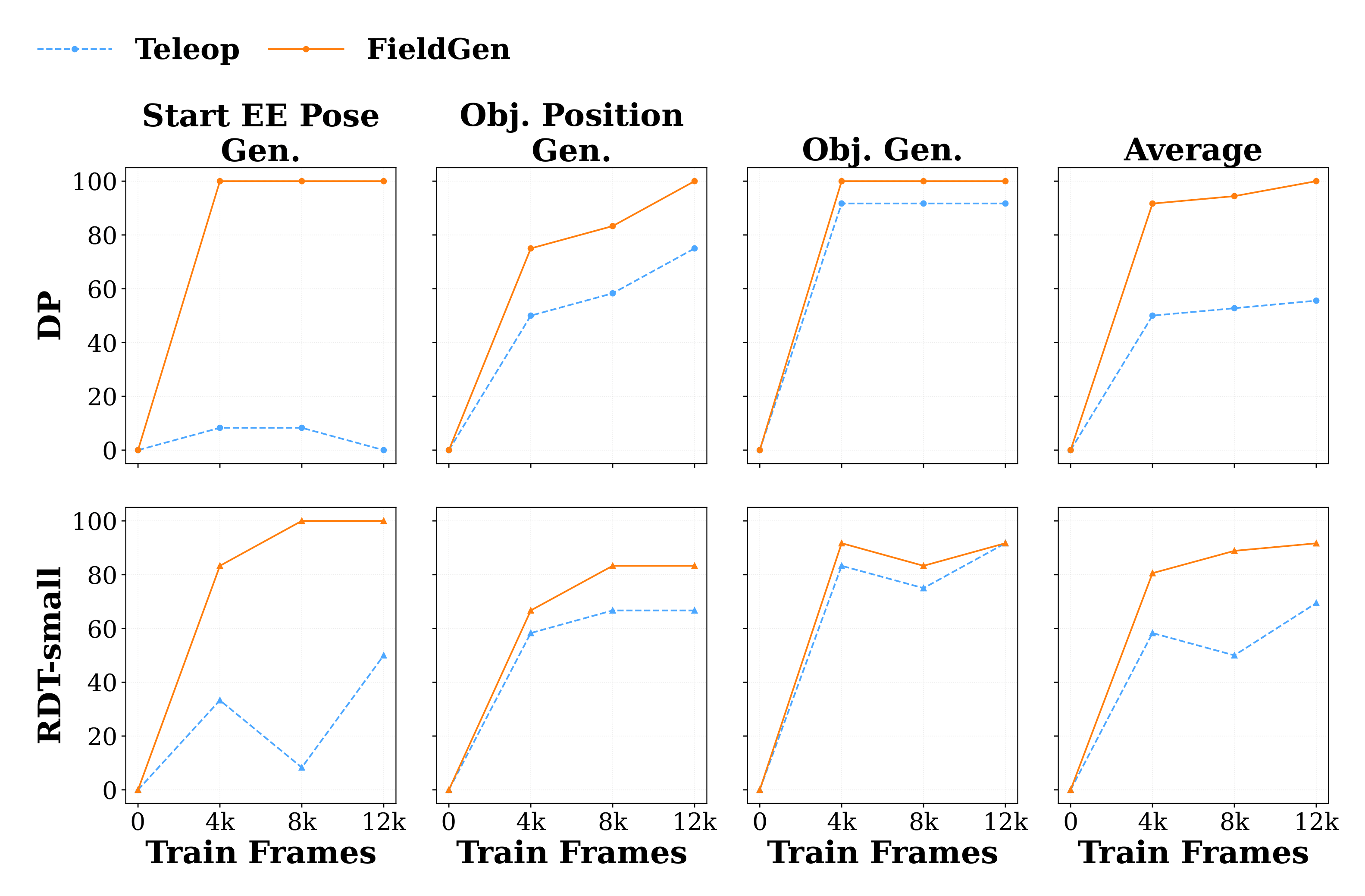
Generalization Evaluation: We test three generalization regimes: (1) varied initial end-effector poses, (2) varied object positions, and (3) unseen intra-category objects. FieldGen consistently shows advantages across all scenarios—e.g., DP hits 100% success on Start EE Pose and Object Generalization with only 4000 frames, demonstrating the robustness of policies trained on FieldGen-generated data.
Trajectory Diversity and Spatial Coverage
Increased spatial coverage from FieldGen directly translates into stronger manipulation policies.
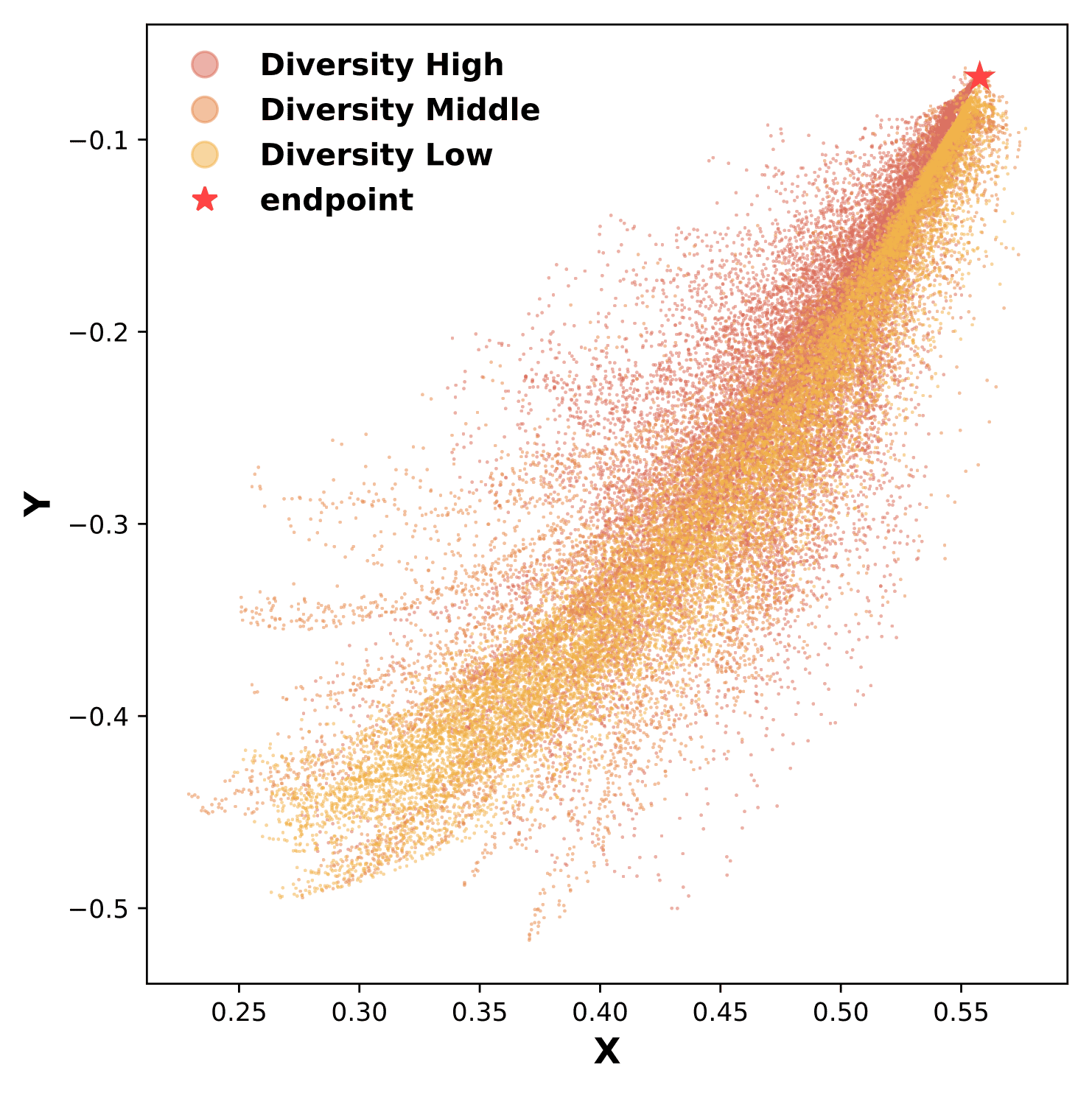
Spatial Coverage Analysis: By voxelizing the workspace, we find FieldGen (High diversity) occupies 18.14% of voxels, significantly outperforming teleoperation with fixed (Low: 9.04%) or varied (Middle: 15.44%) starts. Success rates increase from 0% → 54.2% → 83.3%, providing strong evidence that increased spatial coverage yields more robust manipulation policies.
Ablation Studies
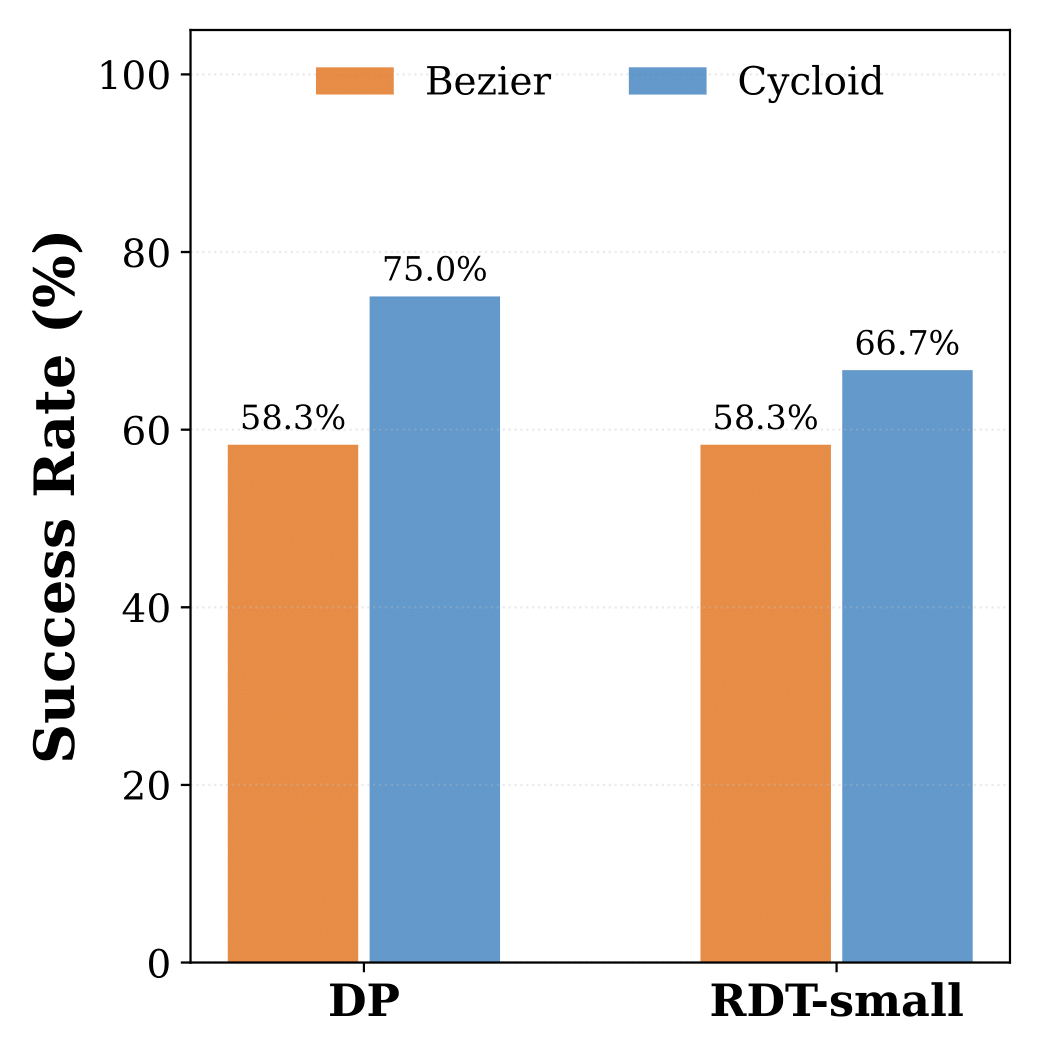
Curve Type Analysis
We compare different trajectory curve types for the cone field. The half-cycloid curve provides the smoothest and most effective approach trajectories.
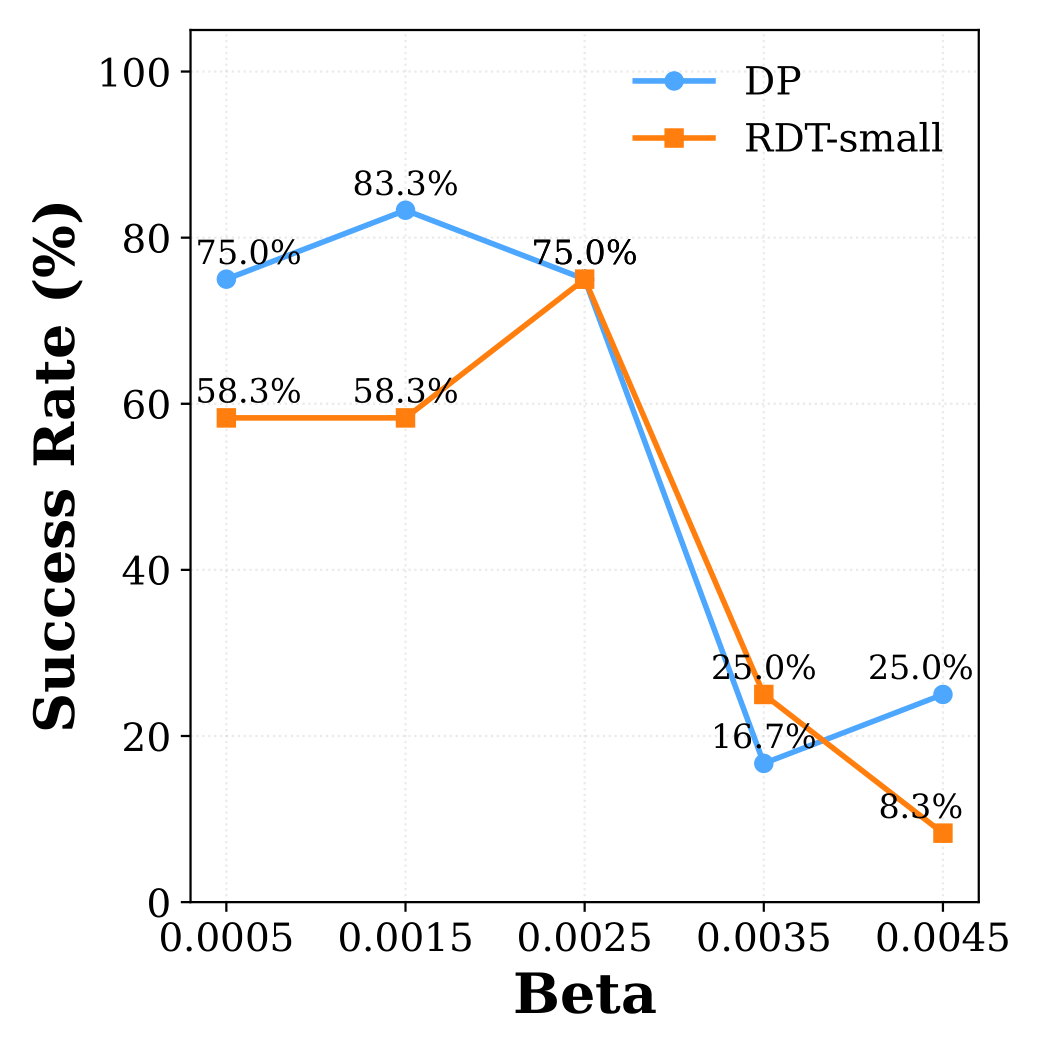
Step Size (β) Analysis
The step size parameter β controls trajectory granularity. We find optimal performance with β values that balance smoothness and computational efficiency.
Ablation on FieldGen-Reward
To further enhance data diversity and guide policy learning with explicit quality signals, we introduce a reward-conditioned variant of our method, termed FieldGen-Reward. This approach allows the policy to learn from a broader spectrum of trajectories, including those that are sub-optimal but still informative.
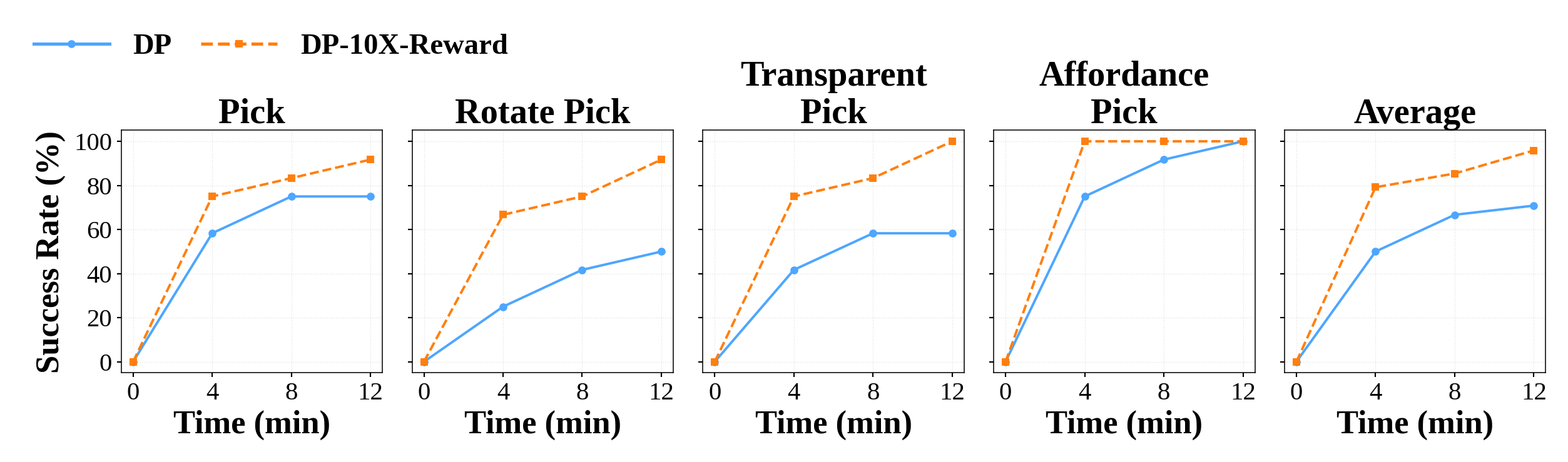
In our experiments, we compare a standard Diffusion Policy (DP) trained on FieldGen data against a reward-conditioned version (DP-R.). For the same collection time budget, the FieldGen-Reward pipeline generates 10 times the number of trajectories, with rewards uniformly distributed between 0 and 1. The DP-R. model is conditioned on this additional reward input during training.
Key Findings: The reward-conditioned model (DP-R.) consistently and significantly outperforms the standard DP model across all tasks and time budgets. For instance, after just 4 minutes of data collection, DP-R. achieves an average success rate of 79.2%, a +29.2% improvement over the standard DP. This performance gap widens with more data; at the 12-minute mark, DP-R. reaches a near-perfect average success rate of 95.9%. These results demonstrate that explicitly modeling trajectory quality via rewards enables the policy to learn a more robust and effective representation of the task, leading to substantial gains in performance.
Data Collection Efficiency
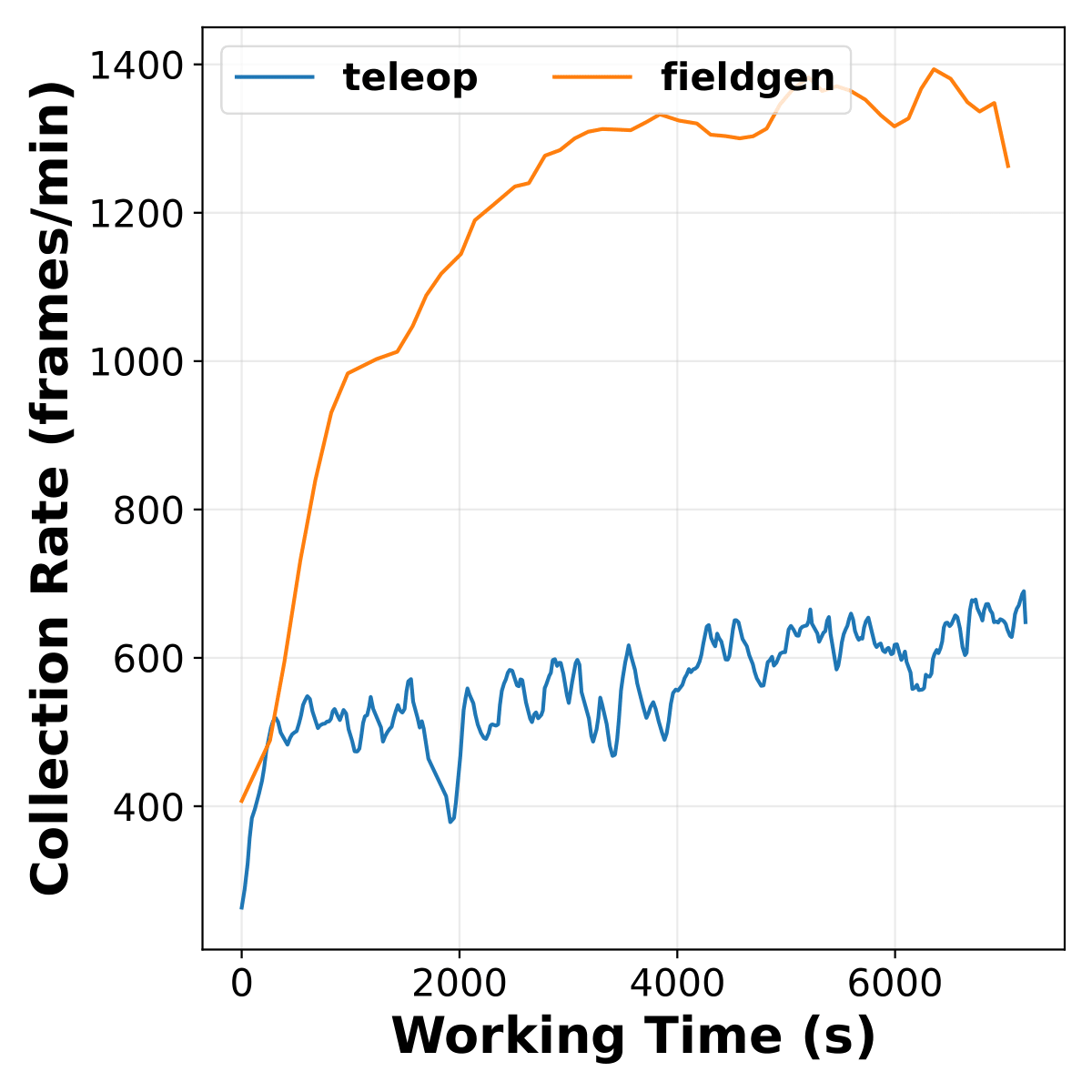
Collection Rate Over Time
FieldGen maintains stable data collection rates over extended periods, while pure teleoperation suffers from operator fatigue.
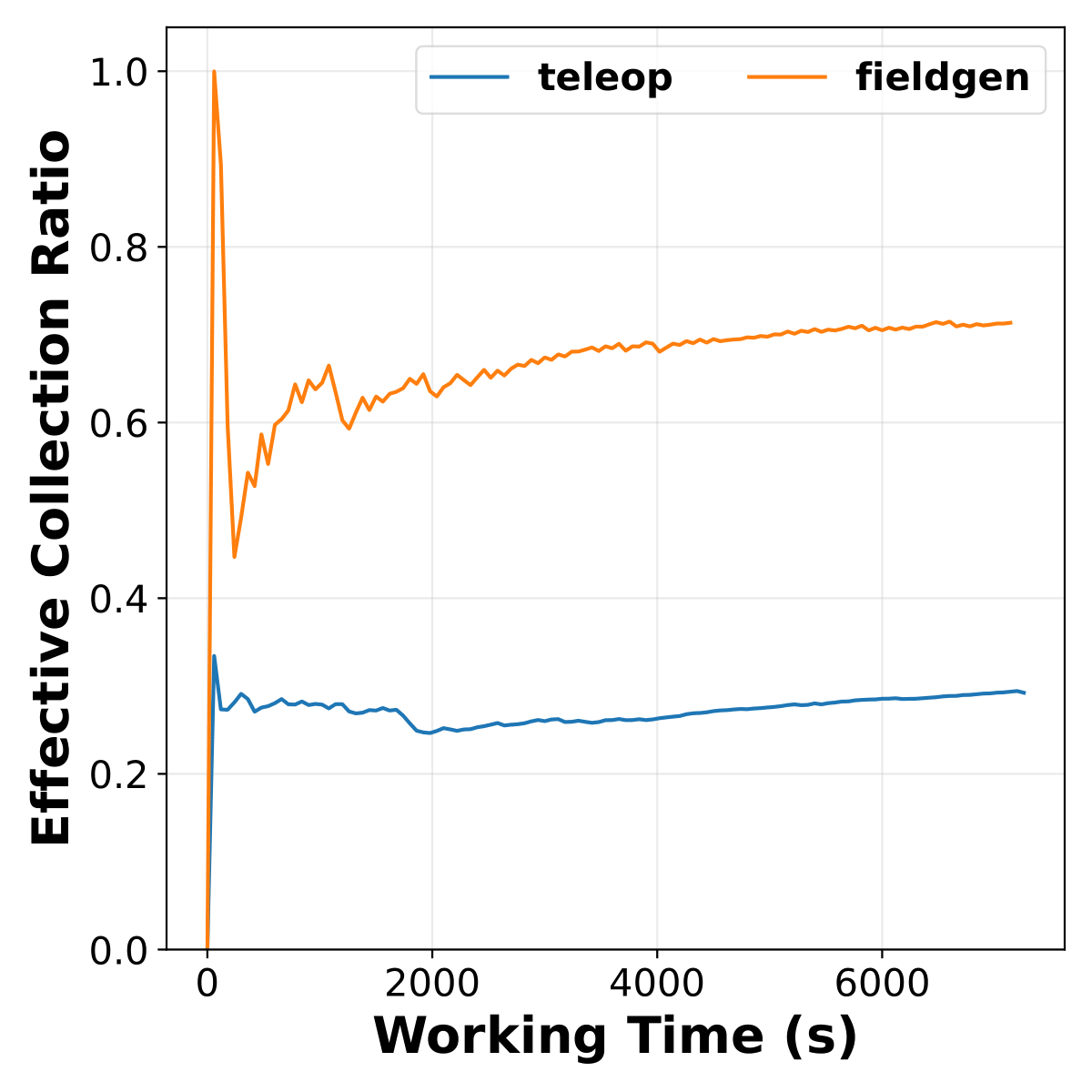
Capture Ratio Analysis
The capture ratio measures the percentage of sampled configurations successfully attracted to the goal. Higher ratios indicate more effective field design.
Key Insight: The automated reach generation enables continuous high-quality data collection with minimal human intervention, making FieldGen practical for large-scale dataset creation.
Motivation and Insight
Our motivation starts here: The 1-to-N teleoperation systems like Genie Centurion needs a base policy to start the data flywheel. In most real world applications, large scale data collection is not allowed or costly. We need a method to rapidly bootstrap the base policy in the deployment environment.
Our key insight is that in most manipulation tasks, only the last few action chunks determine success. The earlier approach phase mainly requires directional, low-precision actions, but benefits from wide spatial coverage to prevent OOD behavior. Can we auto-generate the data to cover the whole space? Thus, by synthetically pairing diverse observations with generated goal-directed actions, we can efficiently produce all necessary data for imitation learning.
Luckily, our method is very easy to use. No pipeline, no extra hardware and no heavy codebase. Simply teleoperate the robot once to manipulate and move the arms around the objects, then run a single Python script—no further action is required for data collection.
BibTeX
@article{wang2025fieldgen,
title={FieldGen: From Teleoperated Pre-Manipulation Trajectories to Field-Guided Data Generation},
author={Wang, Wenhao and Ye, Kehe and Zhou, Xinyu and Chen, Tianxing and Min, Cao and Zhu, Qiaoming and Yang, Xiaokang and Shen, Yongjian and Yang, Yang and Yao, Maoqing and others},
journal={arXiv preprint arXiv:2510.20774},
year={2025}
}